13-Life Long Learning(終身學習)
1. Basic
Life Long Learning(LLL),期望機器不斷學習新的任務,又稱為 Continual Learning、Never Ending Learning、 Incremental Learning
注意:
在 LLL 中,讓機器不斷學習”不同的任務”,實際上是學習類似的任務但”不同的 domain”,只是習慣當成不同的任務
1.1 現實世界的應用
模型上線後蒐集到新的資料,新的資料就可以更新模型的參數
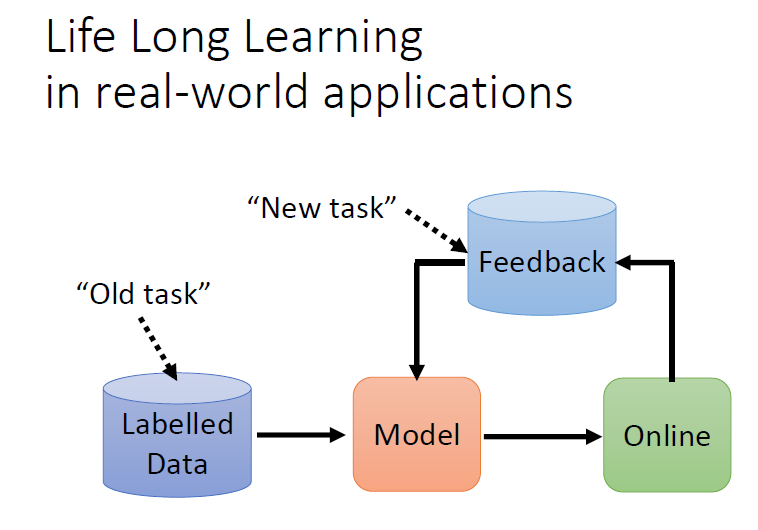
把舊有的資料想成是過去的任務,把新的、來自於使用者 feedback 的資料想成是新的任務
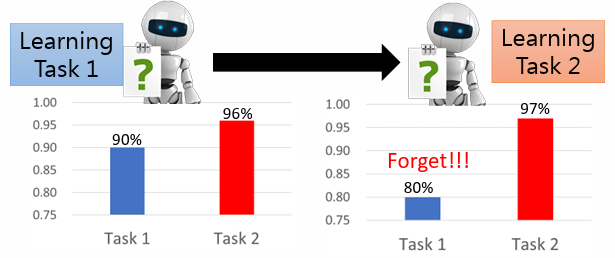
1.2 Catastrophic Forgetting
核心概念機器是學了新的任務(資料)就忘了舊的任務(資料)
1.2.1 Example 1:數字辨識
針對兩個 task,訓練一個模型對不同的數字進行識別
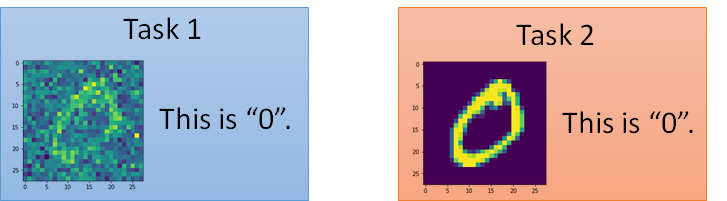
- 先後利用兩個任務的資料進行訓練,以 task 2 的資料訓練模型後,機器在 task 1 的表現下降許多
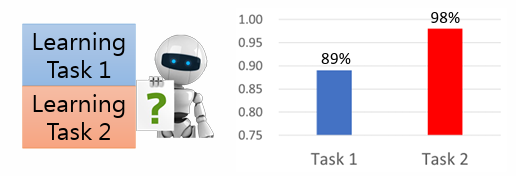
- 同時利用兩個任務的資料進行訓練,機器在兩個 task 上都表現不錯
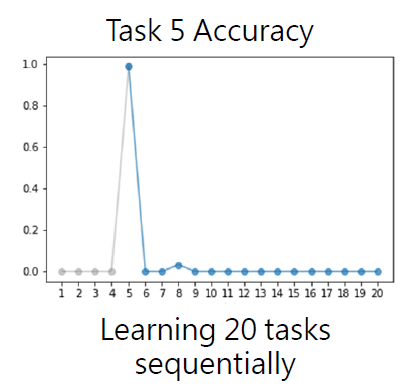
1.2.2 Example 2:QA 任務
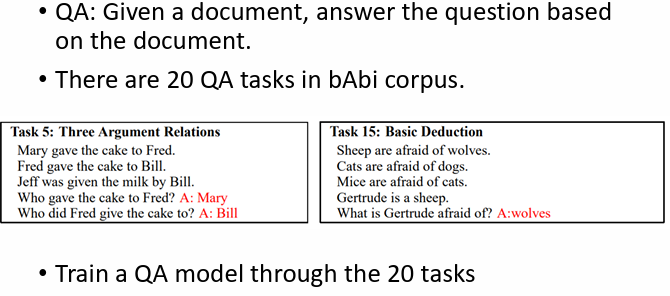
- 依序學 20 個任務,學到 task 5 時的準確率提升,但自 task 6 後準確率暴跌
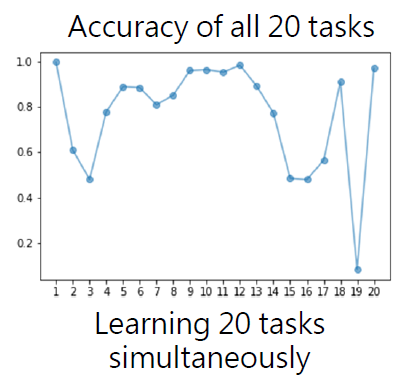
- 同時學 20 個任務
1.3 Multi-Task Training
讓機器同時利用多個任務的資料進行學習的訓練方法稱為 multi-task training
雖然某種程度上可以解決上述 catastrophic forgetting 的問題,但當機器要學新的任務時,都要把之前學過的任務資料也都重新一起帶入訓練,時間和空間難以負荷
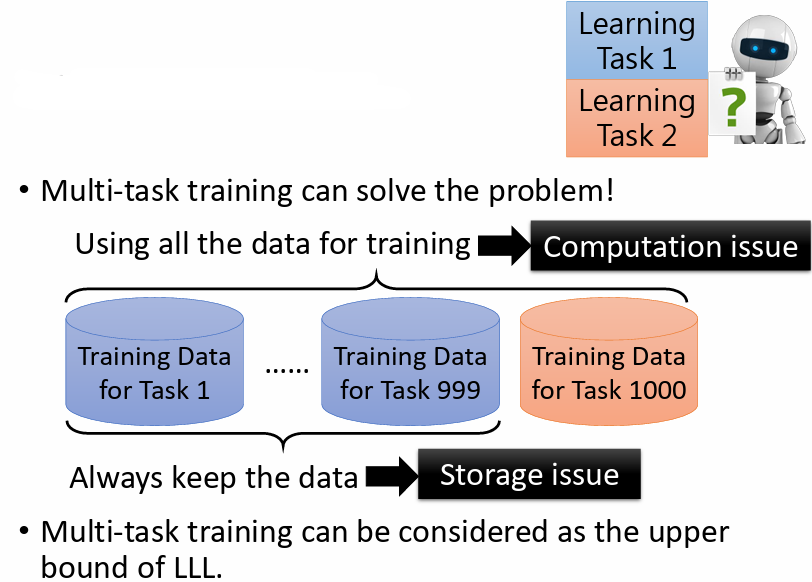
multi-task training 雖不切實際,但它確實可以讓機器學會多個任務,因而被視為 LLL 的 upper bound,是 LLL 沒有辦法超越的結果
研究目標會希望 LLL 的技術去逼近 upper bound 的結果
1.4 Train a model for each task
問題:
- 模型過多無法儲存
- 訊息和資料不能在不同的任務間遷移
1.5 Life-long learning vs Transfer Learning
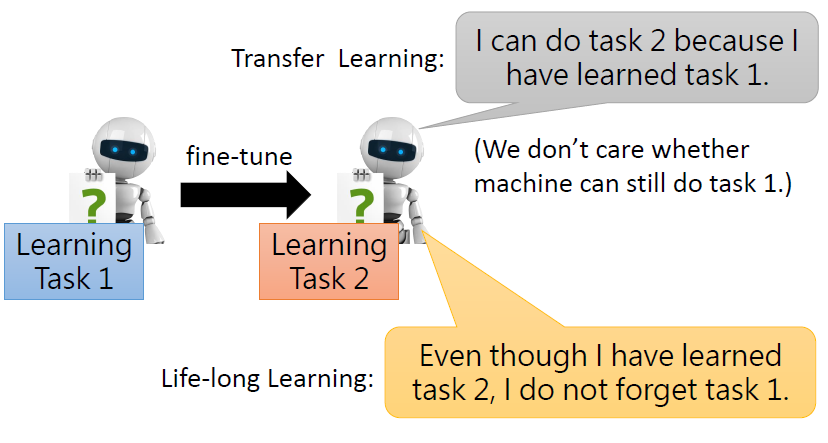
兩者的關注角度不同:
- Life Long Learning 關注的是機器學完新的任務後,還能不能夠解先前的任務
- Transfer Learning 關注的是機器學習完先前的任務後,能不能夠對新的任務有幫助
2. Evaluation
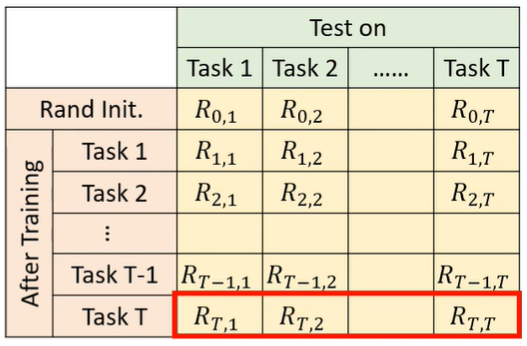
先準備一系列的任務
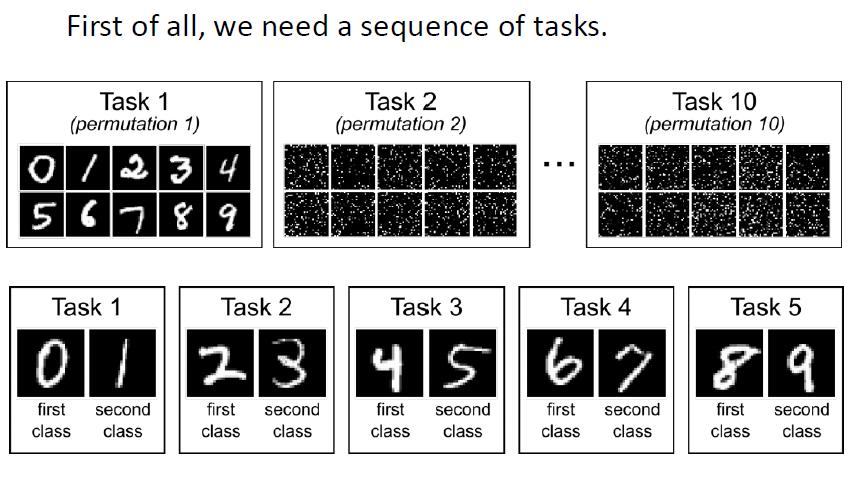
機器依序學習各個不同的任務,每學完一個新任務就在所有任務的測試資料上計算正確率
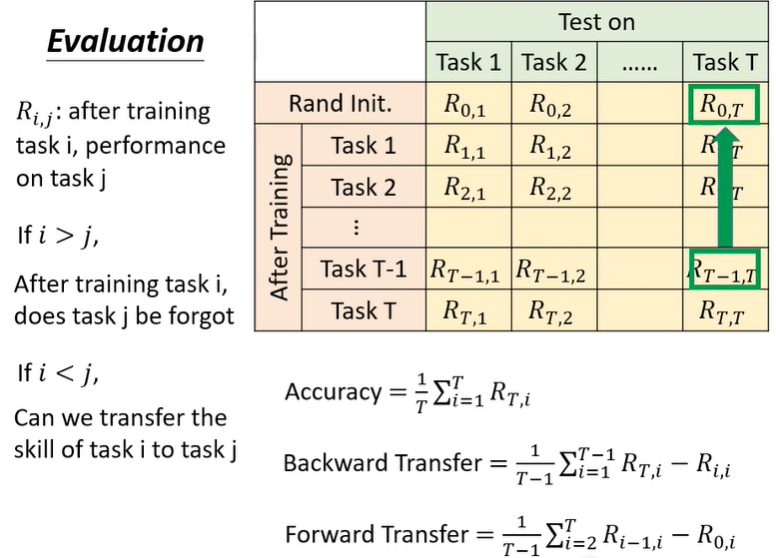
表示學完任務 ,在任務 上的表現
- 若 ,可以觀察機器學了任務 後,在之前學過的任務 上的表現
- 若 ,可以觀察機器還沒學任務 ,只學到任務 ,在任務 上的表現
三種評估方法:
- Accuracy:學完所有任務後,各個任務的準確率
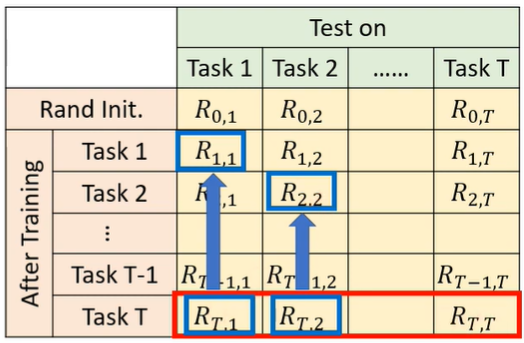
- Backward Transfer
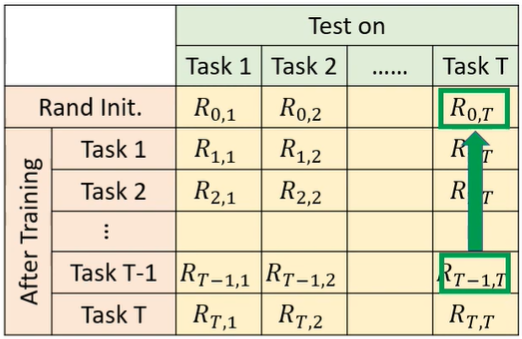
- Forward Transfer:不看任務 T,只看前 T-1 個任務,對在任務 T 的表現
3. Why Catastrophic Forgetting?
關鍵:
任務間的 error surface 不同
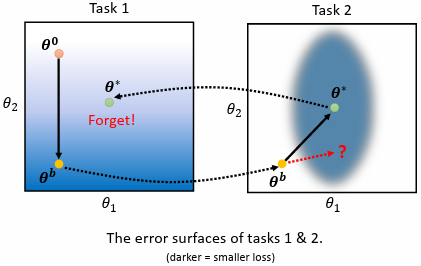
兩個任務的 error surface 如上圖,顏色越深,代表 loss 越小
- 先用 task 1 訓練模型,隨機初始化參數 ,用 gradient descent 更新參數得到
- 將 作為初始參數用 task 2 訓練模型,使用 gradient descent 更新參數得到
問題:
由於兩個任務的 error surface 不同,擁有小的 loss 所對應的參數不同,導致 catastrophic forgetting
解決:
嘗試讓參數往 task 2 的橢圓 error surface 下緣靠近
4. LLL 的三種解法
4.1 Selective Synaptic Plasticity(Regularization based Approach)
每個參數對過去學過的任務的重要性不盡相同
對於舊的任務所學習到的參數有”重要”與”不重要”之別,在學習新的任務時,針對重要的參數盡量維持不變,只要改變不重要的參數
4.1.1 改寫 Loss Function
對模型的每一個參數 新增參數 guard
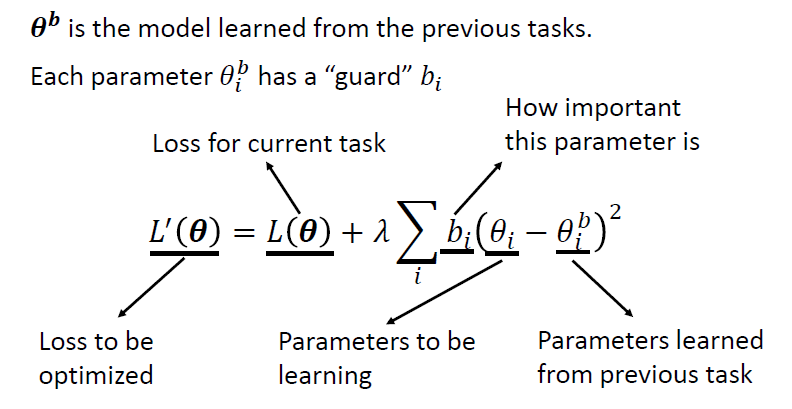
在新的任務原始的 loss 後再加上新學到的參數 減去過去學到參數 並取平方,再乘上當前參數的 guard ,最後針對每一個參數的結果做加總
- 若 越大,表示越希望 與 值越接近
- ,強烈希望 與 相等,會導致 intransigence(在新的任務學不好)
- 若 越小,表示不在乎 與 接不接近
- ,對 沒有限制,會導致 catastrophic forgetting
4.1.2 設定 guard b
人工設定 guard ,在 task 1 上訓練完後得到 ,逐一調整 的每一個參數,觀察在新任務上 loss 的變化
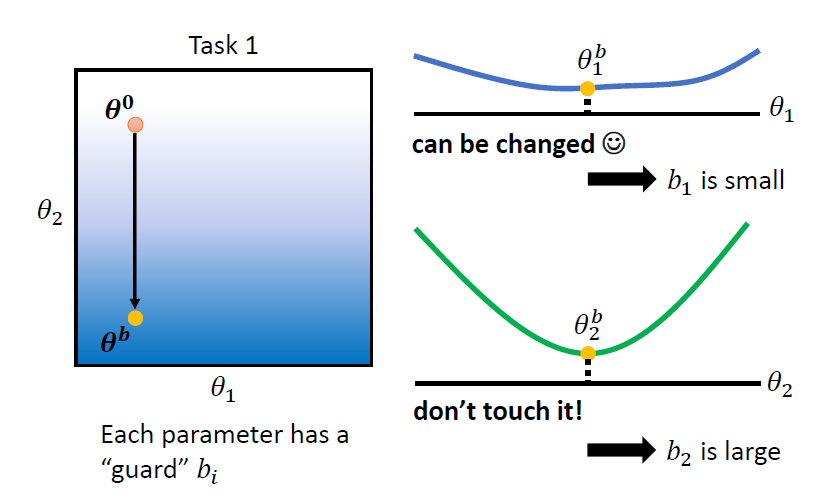
舉例:
- 針對 task 2 調整 ,發現對 task 1 的 loss 影響較小,代表 對 task 1 較不重要,因此將 設較小的值
- 針對 task 2 調整 ,發現對 task 1 的 loss 影響較大,代表 對 task 1 較重要,因此將 設較大的值
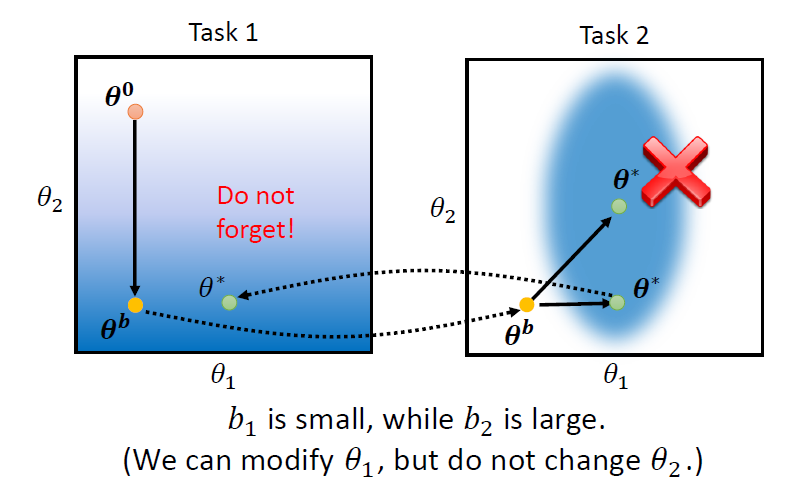
由於 較小、 較大,因此參數在 task 2 上更新時,會更傾向於改變 而不改變 ,如此得到的 在 task 1 和 task 2 上都可以有較好的結果
如何計算 ?
4.1.3 實驗結果
SGD 表示 皆為 0;L2 表示 b 皆為 1;EWC 表示根據 的重要性有不同的
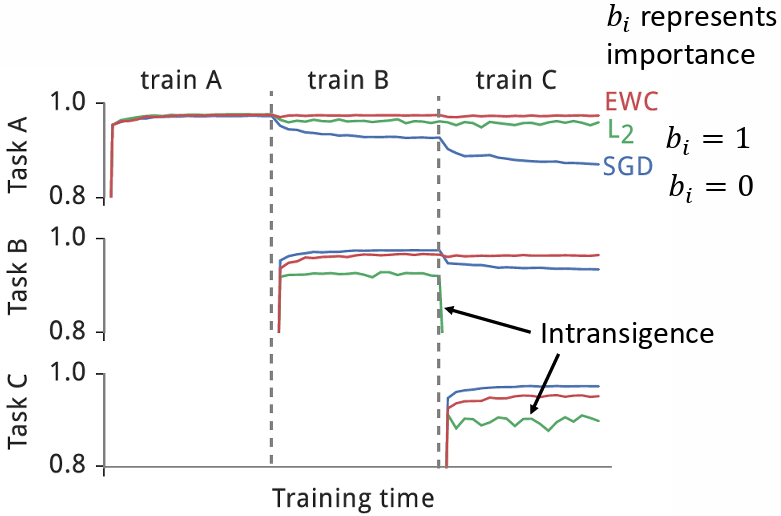
- SGD 方法有 catastrophic forgetting 的問題
- L2 方法雖然沒有 catastrophic forgetting 的問題,但有 intransigence 的問題
- EWC 方法實現了 LLL
4.1.4 Gradient Episodic Memory(GEM)
不在參數上做限制,而是在 gradient 更新的方向上做限制
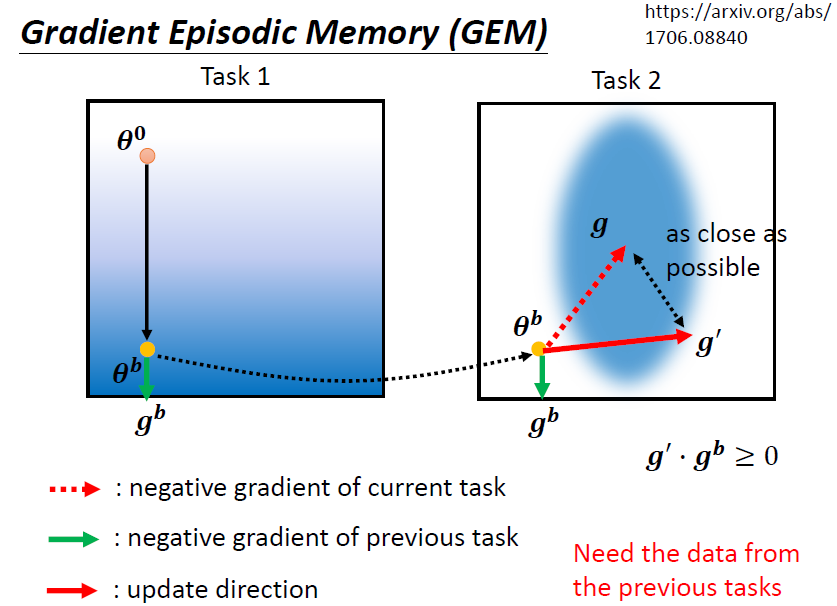
在 task 2 算出 gradient 更新參數前,先計算該參數在 task 1上的 gradient ,之後兩者做內積,若 (夾角為鈍角),則修改 變成 ,讓 (夾角為銳角),且 與 不可以差太多
4.2 Additional Neural Resource Allocation Memory
改變使用在每一個任務里面的 neural 的 resource
4.2.1 Progressive Neural Network
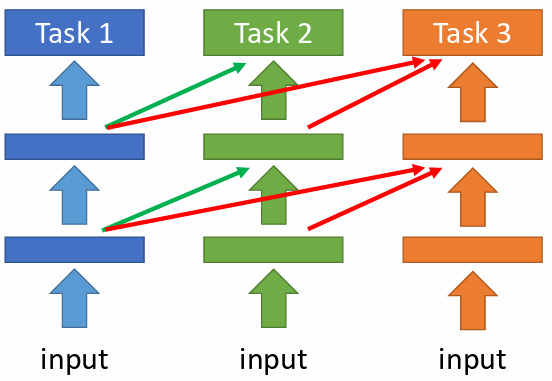
每一個任務都重新訓練一些額外的 neural,以保證過去的任務的模型參數不會被改變
問題:
當模型大小增長過快時,空間上仍難以負荷
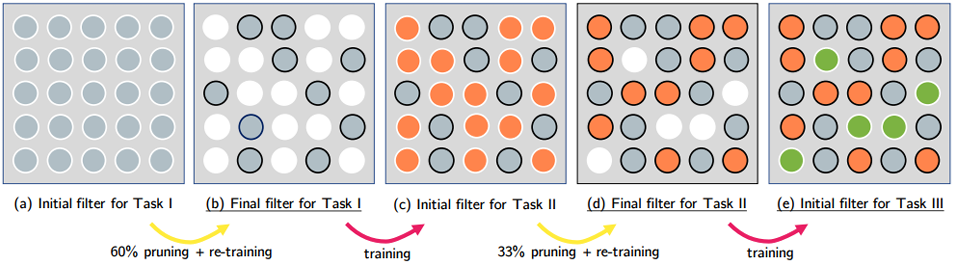
4.2.2 PackNet
先分配一個較大的模型,限制每個任務只允許使用某些參數
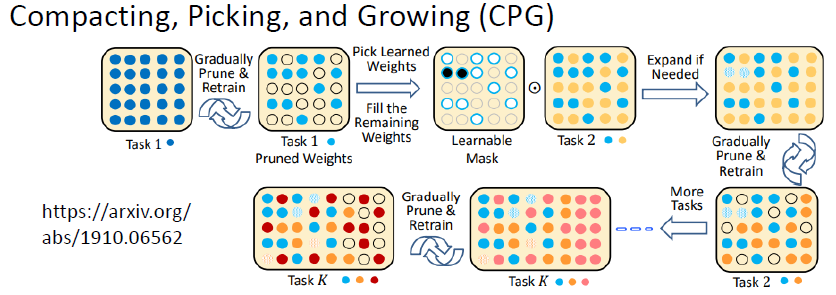
4.2.3 CPG(Progressive Neural Network + PackNet)
模型既可以增加新的參數,且每訓練一個新的任務,又都只保留部分的參數可以拿來做訓練
4.3 Memory Reply
針對每個新任務,額外訓練一個可以產出該任務即過去所有任務的資料的 generator
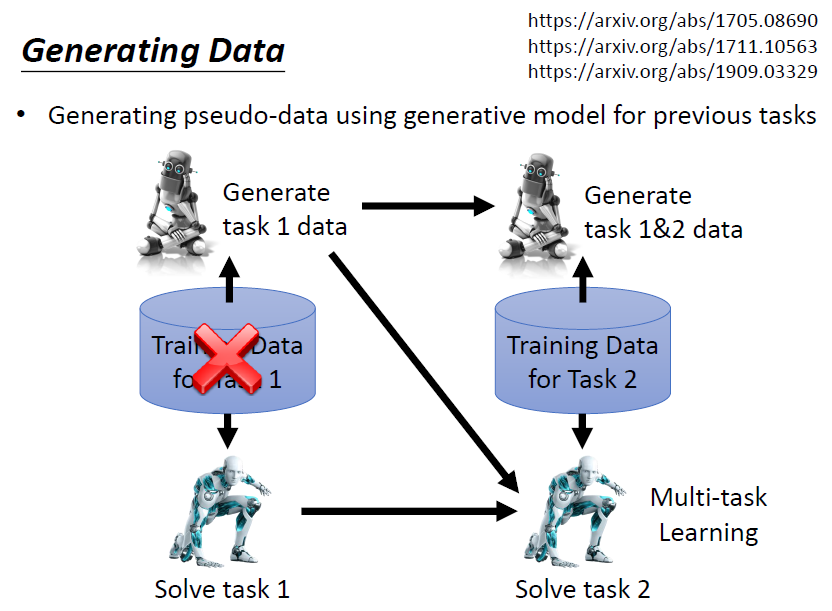
問題:
額外訓練 generator 同樣會佔用空間,但如果這個空間比儲存訓練資料佔用的空間小,那就是一個有效的方法
實際上,此方法往往都可以逼近 LLL 的 upper bound,可以做到跟 multi-task learning 差不多的結果
5. Adding new classes
問題:
不同的任務間的 class 數目不一樣
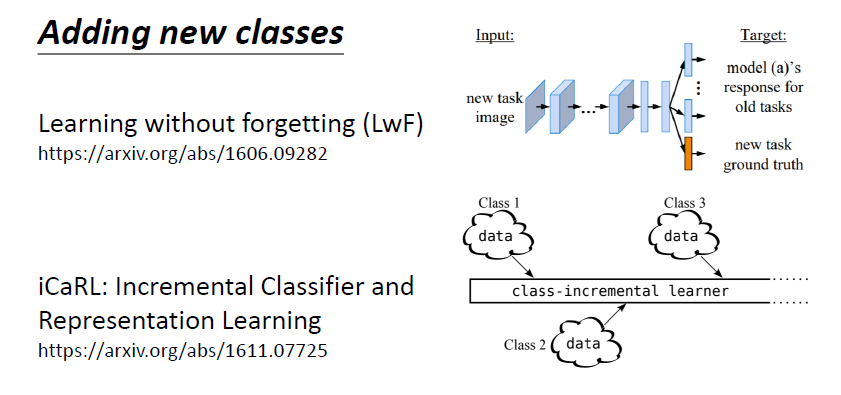
解決:
Learning without Forgetting(LwF)
iCaRL: Incremental Classifier and Representation Learning
6. Three scenarios for Continual Learning(LLL)
LLL 有三種 scenarios,課程只介紹其中一種,其他兩種可參考論文:Three scenarios for continual learning
7. Curriculum Learning
兩個實驗:
- 訓練模型 task 1 有雜訊的圖片,再到 task 2 沒有雜訊的圖片,發生 catastrophic forgetting
- 順序反過來,訓練模型 task 1 沒有雜訊的圖片,再到 task 2,沒有發生 catastrophic forgetting
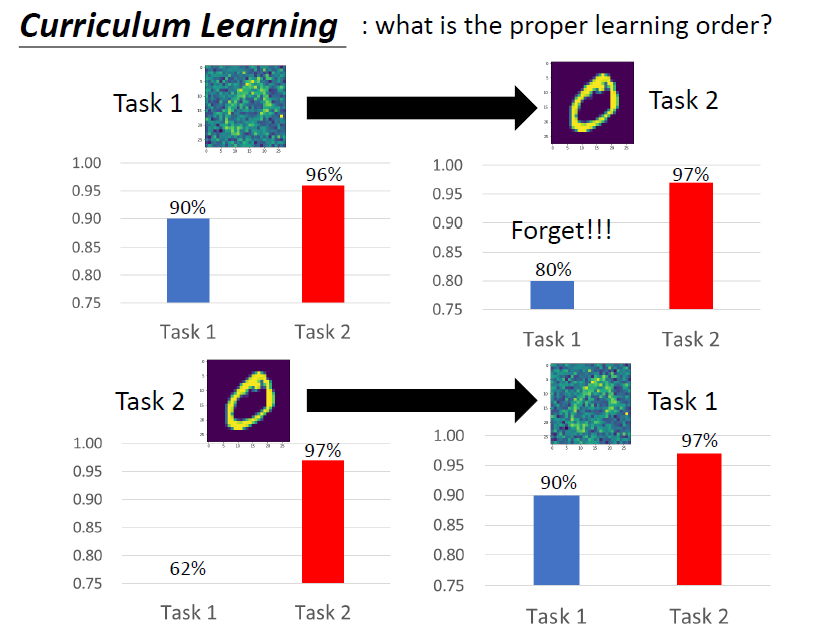
結論:
任務的順序也是關鍵